色彩空间
色彩空间在物体追踪、特征检测等(简单来说就是识别一个东西)扮演着很重要的角色。毕竟每个物体都有特定的颜色和特征,我们可以应用其物体与环境颜色上的差异,从图像中提取特定范围的颜色并加上一些逻辑性的判断,获取待检测物体的位置。颜色
上图可见的是一些常见的颜色,我们人眼一看并可辨认是什么颜色。但是在计算机信息上,我们该如何去定义或描述这些颜色呢?这就是颜色空间的作用了。不同的颜色空间以不同的方式去定义各个颜色,同样的颜色在不同的颜色空间有着不同的值,这是因为每一个颜色空间都有不同的性质。以下我们讨论并比较颜色空间在图像分割上的一些性质。

不同的色彩空间
在本节中,我们将介绍计算机视觉中使用的一些重要色彩空间。我们不会描述它们背后的理论,因为可以在Wikipedia上找到它。相反,我们将发展一个基本的直觉并学习一些重要的属性,这些属性对于以后的决策很有用。让我们加载2个相同立方体的图像,如下所示。默认情况下,它将以BGR格式加载。
Mat bright = imread("cube1.jpg");
Mat dark = imread("cube8.jpg");
两张在不同明亮度拍摄的魔方照片

下面我们要从不同的颜色空间分析这例子图像的颜色性质。从常用到非常用,我会介绍:
- BGR颜色空间(RGB)
- HSV颜色空间
- Lab颜色空间
- YCrCb颜色空间
我们可以使用OpenCV函数cvtColor()在不同的色彩空间之间进行转换。例:
cv::cvtColor(input_img, output_img, cv::COLOR_BGR2LAB); //从BGR转LAB
cv::cvtColor(input_img, output_img, cv::COLOR_BGR2HSV); //从BGR转HSV
cv::cvtColor(input_img, output_img, cv::COLOR_BGR2YCrCb); //从BGR转YCrCb
BGR色彩空间
我制作了个简单的颜色拉条,可以手动尝试每个颜色通道对颜色的关系。 BGR色彩空间具有以下属性
BGR色彩空间
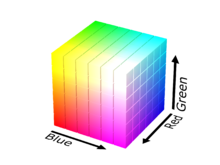
- 它是一种加色空间,其中颜色是通过红色,绿色和蓝色值的线性组合获得的。
- 这三个通道与撞击表面的光量相关。
取值范围
在OpenCV中,BGR的取值范围(默认的CV_8U格式)为:0 >= B >= 255某个通道的值越高,代表那个性质是越高的,反之亦然。如,R通道的值越高,那个像素颜色就越红。
0 >= G >= 255
0 >= R >= 255
让我们将两个图像的B,G和R通道分离,然后观察。
RGB色彩空间的不同通道蓝色(B),绿色(G),红色(R)分别显示
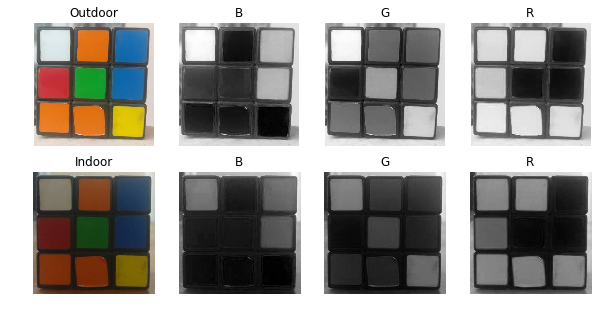
观察结果
如果你查看蓝色通道,可以看到在室内照明条件下,第二张图像中的蓝色和白色部分看起来相似,但是第一张图像中有明显的不同。这种不均匀性使得在这种颜色空间中基于颜色的分割非常困难。此外,两个图像的值之间存在整体差异。下面我们总结下与RGB颜色空间相关的固有问题:- 严重感到不一致性。
- 色度(颜色相关信息)和亮度(强度相关信息)数据的混合。
HSV色彩空间
HSV颜色空间具有以下三个组成部分
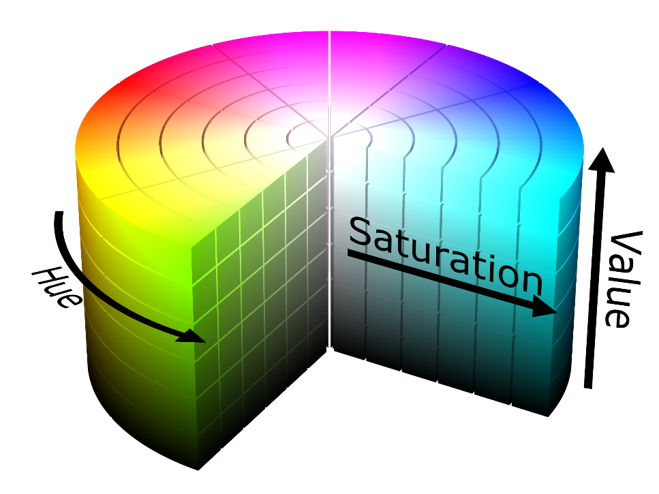
- H – 色相(主波长)。
- S – 饱和度(纯度/颜色阴影)。
- V – 值(强度)。
- 好事是,它仅使用一个通道来描述颜色(H),从而非常直观地指定颜色。
- 取决于设备。
取值范围
在OpenCV中,HSV的取值范围(默认的CV_8U格式)为:0 >= H >= 360 ⇒ OpenCV range = H/2 (0 >= H >= 180) 0 >= S >= 1 ⇒ OpenCV range = 255*S (0 >= S >= 255) 0 >= V >= 1 ⇒ OpenCV range = 255*V (0 >= V >= 255)这两个图像的H,S和V分量如下所示。
analysis_hsv.cpp
...
Mat brightHSV, darkHSV;
// 转换颜色空间
cvtColor(bright, brightHSV, COLOR_BGR2HSV);
cvtColor(dark, darkHSV, COLOR_BGR2HSV);
Mat bright_hsv[3];
split(brightHSV, bright_hsv); // 通道分离
Mat dark_hsv[3];
split(darkHSV, dark_hsv); // 通道分离
String c[3] = {"H", "S", "V"};
for (int i=0; i<3; i++) {
imshow("bright " + c[i], bright_hsv[i]);
}
for (int i=0; i<3; i++) {
imshow("dark " + c[i], dark_hsv[i]);
}
waitKey(0);
destroyAllWindows();
...
HSV颜色空间中的色相(H),饱和度(S)和值(V)分量
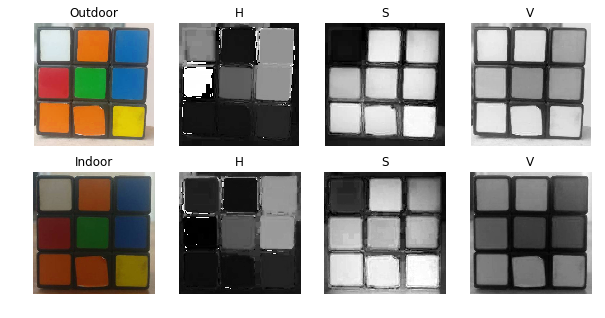
观察结果
两个图像中的H分量非常相似,这表明即使在光照变化下颜色信息也完整无缺。在两个图像中,S分量也非常相似。
V分量捕获落在其上的光量,因此由于照明的变化而发生变化。
室外红色图像和室内图像的红色值之间存在巨大差异。这是因为色相H为轮(0度到360度),红色表示起始角度。因此,它可能取[300,360]到[0,60]之间的值。
LAB颜色空间
Lab颜色空间包含三个组成部分。
LAB色彩空间
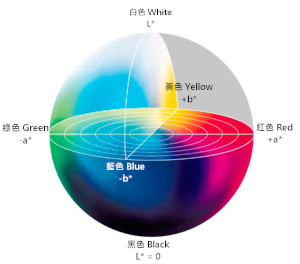
- L –亮度(强度)。
- a –颜色成分,从绿色到洋红色。
- b –颜色成分,从蓝色到黄色。
它具有以下属性。
- 感知均匀的色彩空间,近似我们对色彩的感知方式。
- 与设备无关(捕获或显示)。
- 在Adobe Photoshop中广泛使用。
- 通过复杂的转换方程与RGB颜色空间切换。
取值范围
在OpenCV中,Lab的取值范围(默认的CV_8U格式)为:0 >= L >= 100 ⇒ OpenCV range = L*255/100 (1 >= L >= 255) -127 >= a >= 127 ⇒ OpenCV range = a + 128 (1 >= a >= 255) -127 >= b >= 127 ⇒ OpenCV range = b + 128 (1 >= b >= 255)让我们查看Lab颜色空间中的两个图像,这些图像分为三个通道。
analysis_lab.cpp
...
Mat brightLAB, darkLAB;
// 转换颜色空间
cvtColor(bright, brightLAB, COLOR_BGR2LAB);
cvtColor(dark, darkLAB, COLOR_BGR2LAB);
Mat bright_lab[3];
split(brightLAB, bright_lab); // 通道分离
Mat dark_lab[3];
split(darkLAB, dark_lab); // 通道分离
String c[3] = {"L", "a", "b"};
for (int i=0; i<3; i++) {
imshow("bright " + c[i], bright_lab[i]);
}
for (int i=0; i<3; i++) {
imshow("dark " + c[i], dark_lab[i]);
}
waitKey(0);
destroyAllWindows();
...
LAB颜色空间中的亮度(L)和颜色分量(A,B)。
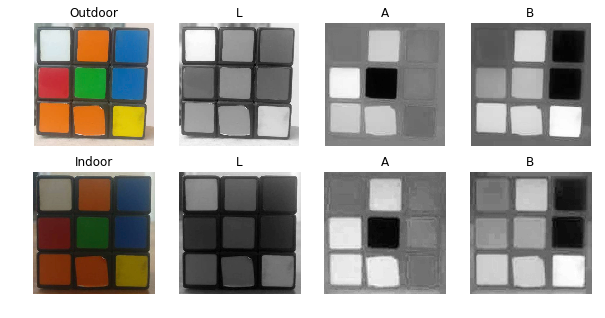
观察结果
从图中可以很明显地看出,亮度的变化主要影响了L分量。包含颜色信息的A和B组件没有发生大的变化。
在两图中,绿色、红色和橙色在B值上区别不大(而在A值上却是极端),蓝色和黄色在A值上区别不大(而在B值上却是极端)
YCrCb颜色空间
YCrCb颜色空间是从RGB颜色空间派生的,并且具有以下三个组件。
YCrCb颜色空间
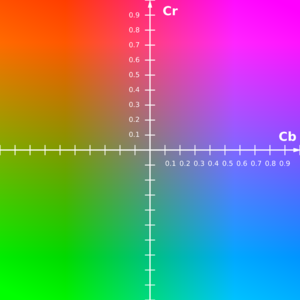
- Y – 伽玛校正后从RGB获得的亮度或亮度分量(Lumaninance,Luma)。
- Cr = R – Y(红色值距离Luma的多远)。
- Cb = B – Y(蓝色值距离Luma的多远)。
此色彩空间具有以下属性。
RGB转换成YCrCb的方程

- 将亮度和色度分量分成不同的通道。
- 通常用于电视传输的压缩(Cr和Cb成分)。
- 取决于设备。
analysis_ycrcb.cpp
...
Mat brightYCrCb, darkYCrCb;
// 转换颜色空间
cvtColor(bright, brightYCrCb, COLOR_BGR2YCrCb);
cvtColor(dark, darkYCrCb, COLOR_BGR2YCrCb);
Mat bright_ycrcb[3];
split(brightYCrCb, bright_ycrcb); // 通道分离
Mat dark_ycrcb[3];
split(darkYCrCb, dark_ycrcb); // 通道分离
String c[3] = {"Y", "Cr", "Cb"};
for (int i=0; i<3; i++) {
imshow("bright " + c[i], bright_ycrcb[i]);
}
for (int i=0; i<3; i++) {
imshow("dark " + c[i], dark_ycrcb[i]);
}
waitKey(0);
destroyAllWindows();
...
YCrCb颜色空间中的亮度(Y)和色度(Cr,Cb)分量

观察结果
和LAB一样,亮度Y会受到光线影响,而颜色成分Cr和Cb不会受到光线影响。与LAB相比,即使在室外图像中,红色和橙色之间的感知差异也较小。
白色在三个颜色通道有不一样的值。
灰度图(Grayscale)
单通道图像我们称为灰度图。它只包含图像的光度信息,并没有颜色信息。所以我们在显示灰度图时一定是只有“灰色”。我们可以一样使用cvtColor变换图像成灰度图。常用的用法为:
cvtColor(img, gray, COLOR_BGR2GRAY);
我们也可以在读取图像时先“下手为强”。可以在第二个参数填上IMREAD_GRAYSCALE或0,将会返回一个单通道灰度图。用法:img = imread("path/to/img.jpg", IMREAD_GRAYSCALE);
取值范围
在OpenCV中,灰度图的取值范围(默认的CV_8U格式)为:0 ~ 255